已经定义了数百个通信协议来实现这种数据交换。每个协议可以分为两类:并行或串行。
并行通信
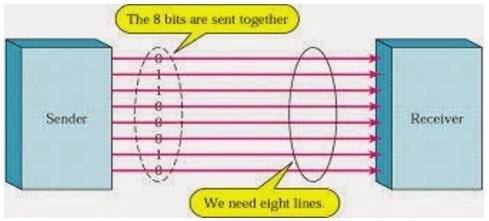
通过输入/输出端口在Arduino和外设之间进行并行连接是短距离(最多几米)的理想解决方案。然而,在其他情况下,当需要在两个设备之间建立较长距离的通信时,不可能使用并行连接。并行接口同时传输多个位。它们通常需要数据总线 – 通过八条,十六条或更多的线路进行传输。数据以1和0的巨大波形传输。

并行通信的优点和缺点
并行通信肯定有其优势。它比串行更快,更直接,相对容易实施。然而,它需要许多的输入/输出(I / O)端口和线路。如果你曾经把一个项目从一个基本的Arduino Uno移动到一个Mega,你就知道微处理器上的I/O线是很宝贵的,而且很少。因此,我们更喜欢串行通信,牺牲针脚空间的潜在速度。
串行通信模块
今天,大多数Arduino板都是用几种不同的串行通信系统作为标准设备。
使用哪个系统取决于以下因素:
- 微控制器有多少个器件与数据交换?
- 数据交换的速度有多快?
- 这些设备之间的距离是多少?
- 是否需要同时发送和接收数据?
有关串行通信的最重要的事情之一是协议,应该严格遵守。它是一套规则,必须应用这些规则才能使设备正确地解释它们相互交换的数据。幸运的是,Arduino会自动处理这个问题,这样程序员/用户的工作就可以简化为简单的写(发送的数据)和读(接收的数据)。
串行通信类型
串行通信可以进一步分类为:
- 同步 – 同步的设备使用相同的时钟,它们的时序彼此同步。
- 异步 – 异步的设备具有各自的时钟,并由前一状态的输出触发。
很容易找出设备是否同步。如果给所有连接的设备提供相同的时钟,则它们是同步的。如果没有时钟线,它是异步的。
例如,UART(通用异步收发器)模块是异步的。
异步串行协议有一些内置的规则。这些规则只是有助于确保可靠且无误的数据传输的机制。这些避免外部时钟信号的机制是:
- Synchronization bits 同步位
- Data bits 数据位
- Parity bits 奇偶校验位
- Baud rate 波特率
同步位
同步位是与每个数据包传输的两个或三个特殊位。它们是起始位和停止位。正如它们的名称,这些位分别标记数据包的开始和结束。
起始位始终只有一个,但停止位的数量可以配置为一个或两个(尽管通常保持为1)。
起始位始终由从1到0的空闲数据线指示,而停止位将通过将线保持在1处而转换回空闲状态。

数据位
每个分组中的数据量可以设置为5到9位的任意大小。当然,标准数据大小是基本8位字节,但其他大小有它们的用途。7位数据包的效率可能比8位高,特别是如果你只是传输7位ASCII字符。
奇偶校验位
用户可以选择是否应该有奇偶校验位,如果是,则奇偶校验应该是奇数还是偶数。如果数据位中的1的数目是偶数,则奇偶校验位为0。奇数的奇偶校验正好相反。
波特率
术语波特率用于表示每秒传输的位数[bps]。注意,它指的是位,而不是字节。协议通常要求每个字节与几个控制位一起传输。这意味着串行数据流中的一个字节可以包括11位。例如,如果波特率为300bps,则每秒可以传输最大37字节和最小27字节。
Arduino UART
以下代码将使Arduino在启动时发送hello world。
void setup() {
Serial.begin(9600); //set up serial library baud rate to 9600
Serial.println("hello world"); //print hello world
}
void loop() {
}
将Arduino草图上传到Arduino后,打开Arduino IDE右上角的串口监视器搜索 。
。
在串口监视器的顶部框中键入任意内容,然后按发送键或键盘上的enter键。这将发送一系列字节到Arduino。
以下代码返回它接收到的任何东西作为输入。
以下代码将使Arduino根据提供的输入传送输出。
void setup() {
Serial.begin(9600); //set up serial library baud rate to 9600
}
void loop() {
if(Serial.available()) //if number of bytes (characters) available for reading from {
serial port
Serial.print("I received:"); //print I received
Serial.write(Serial.read()); //send what you read
}
}
请注意,Serial.print 和 Serial.println 将发回实际的ASCII代码,而 Serial.write 将返回实际的文本。请参阅ASCII代码了解更多信息。
发布者:suiyublg,转转请注明出处:https://huibian.net/1305-2/